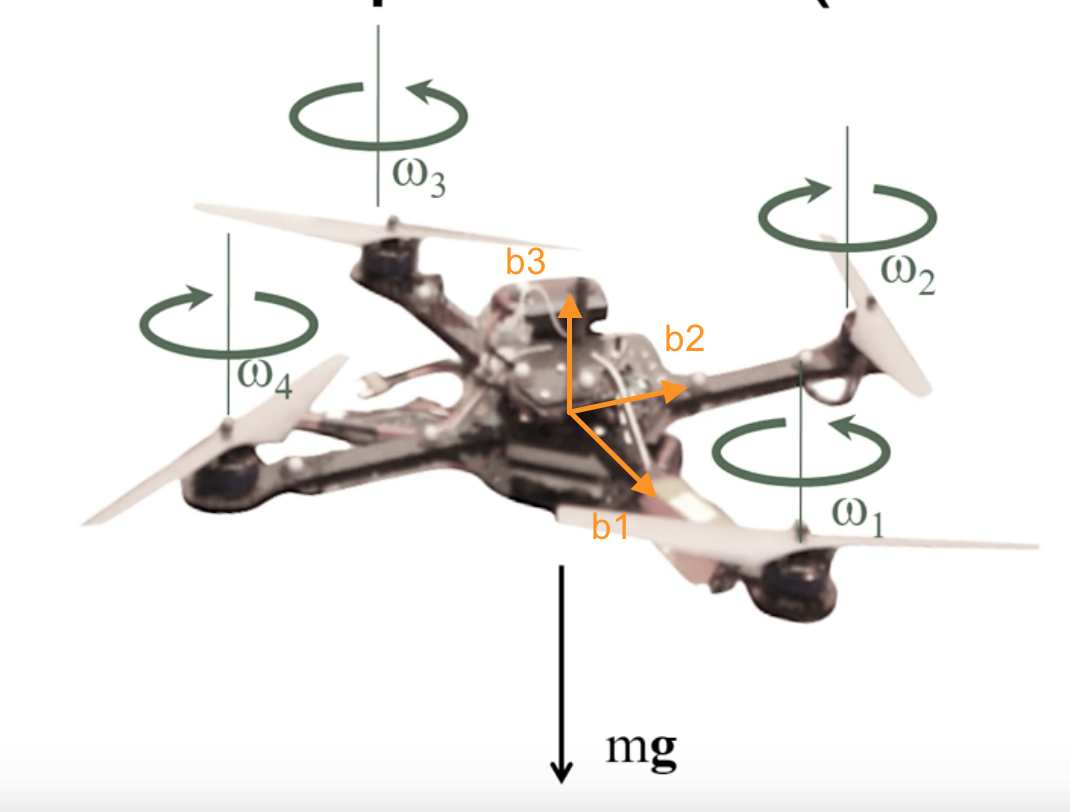
Minimum snap trajectory generation and control for quadrotors. We address the controller design and the trajectory generation for a quadrotor maneuvering in three dimensions in a tightly constrained setting typical of indoor environments. In such settings, it is necessary to allow for significant excursions of the attitude from the hover state.
This work is an attempt to imitate minimum snap trajectory generation and control for quadrotors. pdf with my personal modification. ; I only leave the information which i think is worth record. Proposed a trajectory generator based on a*, d* and rrts to fultill complex indoor flying tasks.
Developed a controller for following trajectories requiring large accelerations based on. Minimum snap trajectory generation and control for quadrotors. We address the controller design and the trajectory generation for a quadrotor maneuvering in three dimensions in a tightly constrained setting typical of indoor environments.
In such settings, it is necessary to allow for significant excursions of the attitude from the hover state. Contribute to ardyadipta/quadrotor_autonomy development by creating an account on github. We address the controller design and the trajectory generation for a quadrotor maneuvering in three dimensions in a tightly constrained setting typical of indoor environments.
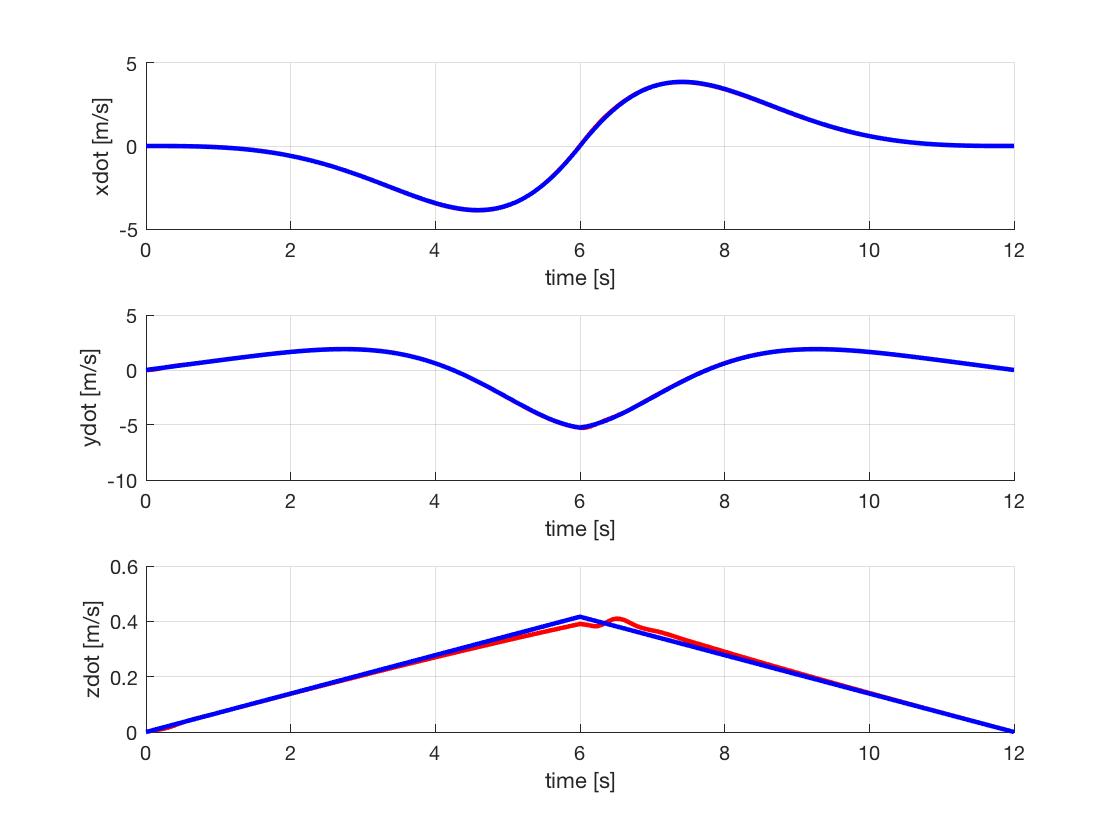
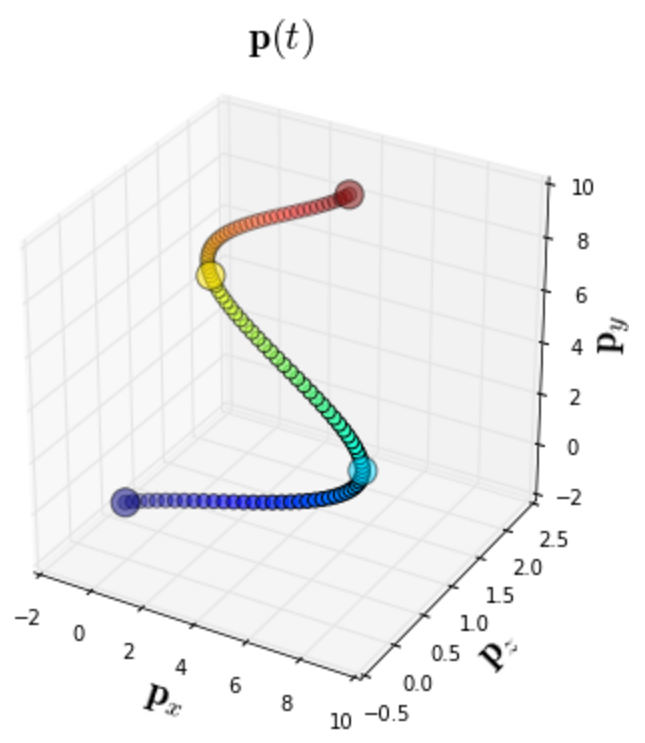
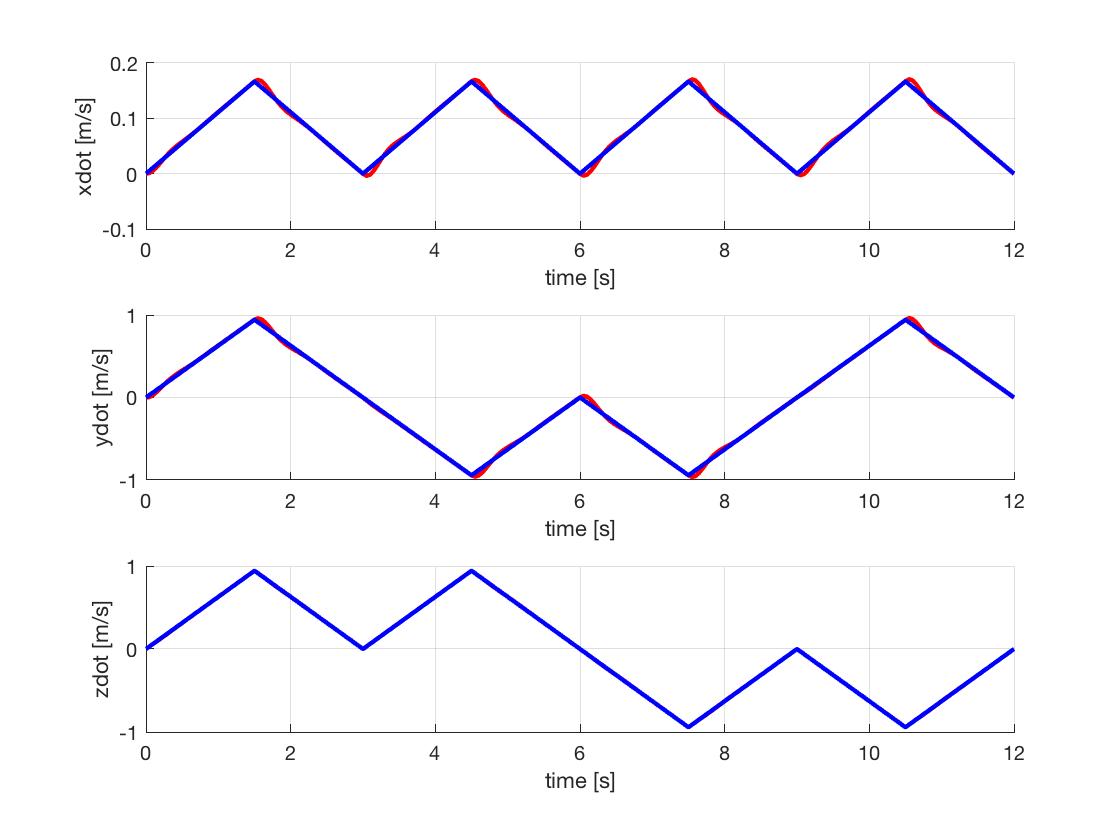
In such settings, it is necessary to allow for significant excursions of the attitude from the hover state and small angle approximations cannot be justified for the roll. W e want to generate a minimum snap trajectory that. Passes between two points r (0) and r (t f) in a specified time.
And control for quadrotors,” in. Minimum snap trajectory generation and control for quadrotors Ieee, 2011 ieee international conference on robotics and automation add/edit.
We address the controller design and the trajectory generation for a quadrotor maneuvering in three dimensions in a tightly constrained setting typical of indoor environments. In such settings, it is necessary to allow for significant. We address the controller design and the trajectory generation for a quadrotor maneuvering in three dimensions in a tightly constrained setting typical of indoor environments.
In such settings, it is necessary to allow for significant excursions of the attitude from the hover state and small angle approximations cannot be justified for the roll and pitch. Minimum snap cubic spline algorithm is used to generate a dynamically feasible optimal trajectory passing through the waypoints then a nonlinear model predictive control (nmpc) Our algorithm is numerically stable for large numbers of segments and is able to generate trajectories of more than 500, 000 segments.
The computational speed and. Minimum snap trajectory generation and control for quadrotors daniel mellinger and vijay kumar. Our focus in this paper is on the modeling, controller.
Our algorithm is numerically stable for large numbers of segments and is able to generate trajectories of more than $500,000$ segments. The computational speed and. Implementation of minimum snap trajectory generation for quadrotors in ros.
2. build on ros. Clone this repository to your catkin workspace and catkin_make.